。这些机器人(及其人类队友)汇聚在此是为了征服美国国防高级研究计划局(DARPA)设计的一个大型地下赛道,这也是其为期三年的地下挑战赛(
地下挑战赛于2018年初首次发布。DARPA设计该竞赛的目的是推动极端条件下实用机器人技术的发展,竞赛基于3种不同的地下环境:人造隧道、地下城市和天然洞穴。为了取得好的比赛成绩,机器人必须进行团队合作,在严格规定的时间内穿越数公里的未知区域并绘制出地图,搜索找到各种人造物品,并精确地确定它们的位置。为了更逼真地模拟应急人员可能使用自主机器人的场景,机器人要经历黑暗、灰尘、烟雾,甚至间或会阻塞它们行进的崩塌(由DARPA控制)。
本次大赛的直接资助加奖金 额达到数百万美元,DARPA鼓励国际学术机构和行业开展合作。各参赛队可在三场巡回预赛中体验每种环境。
2019年8月,隧道巡回赛在匹兹堡郊外的美国国家职业安全卫生研究所的实验煤矿举行,比赛期间,许多参赛团队在隧道的第一个拐弯处就与机器人失去了联系。6个月后,城市巡回赛在华盛顿州萨特索普一座未完工的核电站举行,参赛团队通过各种方式加强了通信能力,有的采用直接的以太网电缆,有的使用电池供电的网状网络节点,在理想的情况下,机器人走出通信范围之前,会像扔面包屑一样沿途扔下网络节点。洞穴巡回赛原定于2020年秋季举行,后因新冠疫情而取消。
当各支参赛队伍进入路易斯维尔巨洞,参加地下挑战赛决赛时,比赛的重点将不再是通信,而是自主性。和预赛一样,参赛人员不允许进入赛道,而且每队只允许一人与该队的机器人进行远程交互,因此直接远程控制是不切实际的。很明显,快速穿越赛道唯一的可行办法是机器人团队自主决定往哪里走、如何到达那里。 DARPA为地下挑战赛决赛费尽了心思,在现有洞穴中建造了一条长达1公里的巨大赛道。工作人员用集装箱首尾相连形成复杂的网络,其中许多经过精心雕琢和装饰,很像采矿隧道和天然洞穴。办公室、仓库,甚至是一个地铁站,都是从零开始建造的,它们构成了赛道的城市部分。各参赛团队可用1个小时的时间尽可能多地找到40件人造物品。想要在比赛中得分,机器人必须向赛道入口处的基站报告物品的位置,这是一个挑战,因为在赛道的远端无法实现直接通信。
共有8支队伍进入了地下挑战赛决赛,其中大多数都带来了精心设计的可协同工作的机器人组合。轮式机器人的移动性更加可靠;四足机器人有令人惊讶的能力,尤其是在复杂地形中;无人机则可对一些大的洞穴进行全面的探测。
到决赛结束时,有两个参赛团队分别发现了23件物品:Cerberus团队,由内华达大学里诺分校、苏黎世联邦理工学院、挪威科技大学、加州大学伯克利分校、牛津机器人研究所、Flyability无人机公司,以及内华达山脉公司的研究人员组成;CSIRO Data61团队,由澳大利亚联邦科学与工业研究组织(CSIRO)的Data61部门、Emesent公司,以及佐治亚理工学院的研究人员组成。两队得分相同,触发了打破平局的规则:哪支队伍最快找到最后一件物品?最终Cerberus获得了第一名,它只比CSIRO快了46秒。
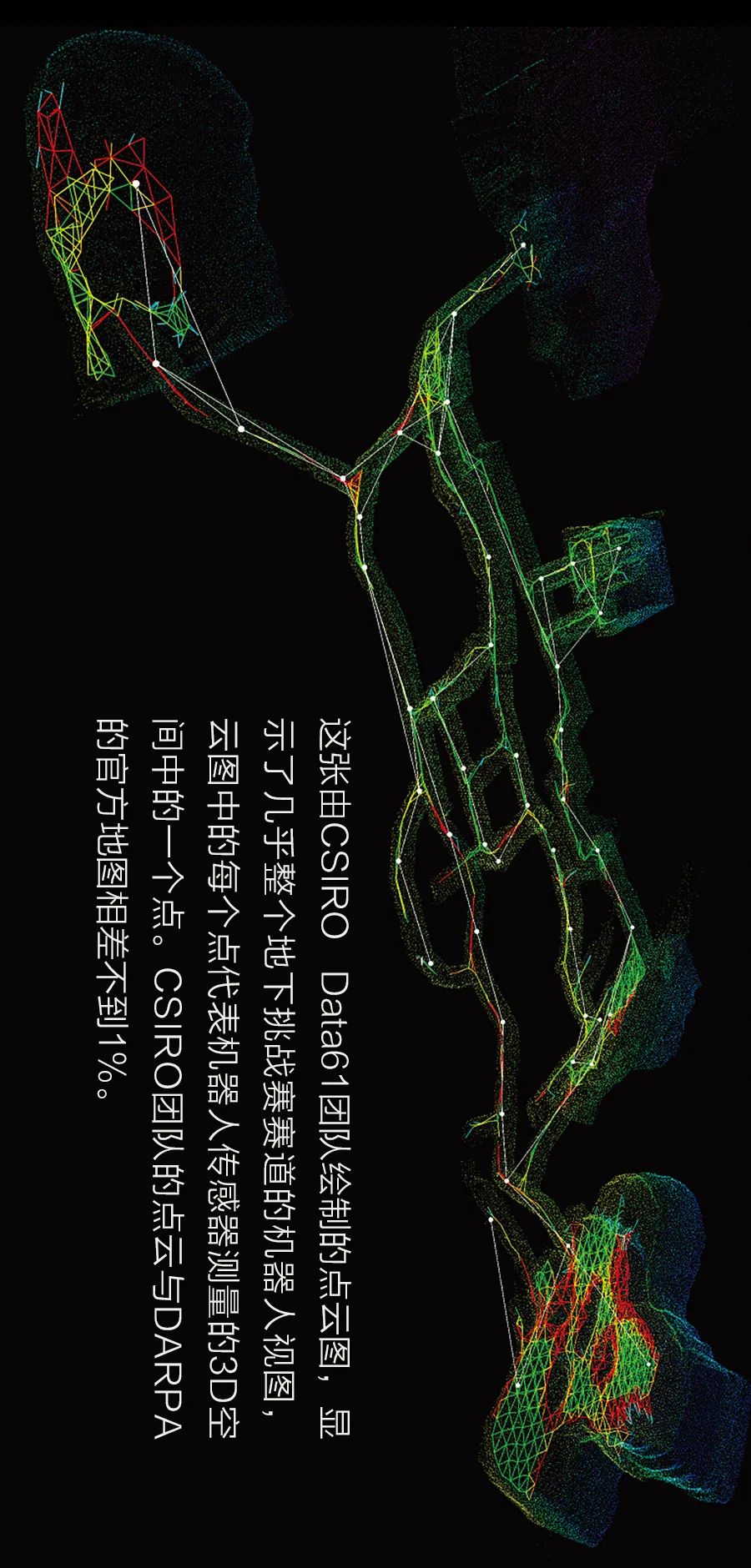
尽管排名第二,但CSIRO团队的机器人取得了一项惊人成绩:它们绘制的赛道地图与DARPA的线%,与人类专家团队花了许多天绘制的地图实际上完全匹配。这正是地下挑战赛想要激发的那种实在的、基本的进步,负责此次挑战赛的DARPA项目经理蒂姆•钟(Tim Chung)说。
“地下发生的事情太多了,很多事情我们通常还没有考虑太多,但如果你看看我们在地下修建的基础设施数量,真的是非常庞大。”钟对《科技纵览》说,“在地下环境中,我们有很多能够感知、理解和导航的机会,有工程集成挑战以及基础设计挑战,还有我们尚未解决的理论问题。这些都是DARPA最感兴趣的问题,因为这将在5年、10年,最多15年里,改变机器人技术的面貌。”
《科技纵览》当时在路易斯维尔报道了地下挑战赛决赛,近期,围绕地下挑战赛的参赛经历,以及该赛事对机器人技术未来的影响,我们采访了蒂姆•钟、CSIRO Data61团队负责人纳文达•科特奇(Navinda Kottege)和Cerberus团队负责人科斯塔•亚历克西斯(Kostas Alexis)。
DARPA有几百个项目,但大多数项目都没有百万美元奖金和持续多年的国际比赛。地下挑战赛有何特别之处呢?蒂姆•钟:DARPA的理念时常会带来一种完全不同的创新刺激模式。当知道在某个领域即将取得突破,但不确定该突破将如何发生,而广泛公告然后选择方案这种传统的DARPA项目模式可能会限制创新时,我们将为寻求创新而采用某种不同的模式。DARPA认为,地下挑战赛正有这样的作用,它可以吸引机器人行业群体解决我们预期有影响的问题,比如,在严峻环境中的恢复力、自主性和感知力。而且你能发现这些技术挑战交织在一起的地方就是地下。
这些团队在自主绘制环境地图方面的技能令人印象非常深刻,您能谈谈吗?蒂姆•钟:我们请了一个专家团队,他们拥有专业的测绘设备,并花了很多天的时间制作出一张精确校准真实赛道的地下挑战赛赛道地图。然后在比赛中,我们看到这些机器人在不到一个小时的时间里,几乎完全覆盖了整个赛道,我简直不敢相信那些点云有多完美!(见下面点云图)我觉得这真的是一种“加速剂”。可以信任地图时,你就有了更多可执行的环境感知。这不是一个已经解决的问题,但当你达到我们在地下挑战赛中看到的精确程度,那就是一种有潜力解锁未来各种创新的门户技术。
自主性是地下挑战赛的必要组成部分,但让人参与其中依然至关重要。您认为人会继续成为高效机器人团队的必要组成部分吗?还是说未来将是完全自主的?
蒂姆•钟:在早期比赛中,我们看到了很多手把手的指导,操作员给机器人发出低级指令。但各参赛队伍很快意识到,他们需要一种更自主的方法。不过,实现中很难实现完全自主,我认为人将继续扮演一个很重要的角色,只不过这个角色需要进化和转变,专注于人类最擅长的事情。 我认为,人从操作员进步到监管员,这将扩展人-机器人团队能够执行的任务类型。在决赛中,我们看到机器人在赛道上探索和寻找人造物品,而监管员则在忙于其他事情,甚至没有关注机器人。这太酷了。机器人在做它们需要做的事情,让人有时间进行高级决策。从基本的远程遥控到“机器人做机器人的事,我做我的事”,这是一个巨大的变化。机器人必须变得能力更强,(人类)才能从操作员过渡到监管员。
在地下环境中,机器人还面临哪些挑战?蒂姆•钟:关于环境可通过性的分析和推理仍然是一个问题。机器人如果能更多地了解它们在哪里行者、在哪里绕圈飞行,将能以更快的速度通过这些环境。尽管在测绘方面它们比人快了一到两个数量级,但机器人的行动速度仍然相对较慢。提高一个数量级将真正有助于改变局面。速度将成为决定性的促成因素,并对紧急救援场景产生巨大影响,那里每分钟都很重要。
您认为地下挑战赛已经或将要对机器人技术产生哪些影响?蒂姆•钟:在我看来,地下挑战赛中使用的许多技术正在实现产品化和商业化,这意味着机器人到达紧急救援人员手中的时间已经大大缩短。这些已经发生,而且比赛期间正在发生,这真的是一个巨大的影响。
纳文达•科特奇:事实上,我们身处地下环境是挑战的一方面,也是一个非常重要的方面,但如你把它分解来看,地下挑战赛意味着我们身处的环境中,GPS不可用,无法通信,我们面临着非常困难的移动性挑战。在其他许多情形中也会遇到这些事情,例如,福岛核事故虽然不是发生在地下,但要想派机器人进入,通信是一个巨大的问题。再比如亚马逊雨林,在那里也会遇到类似的通信和移动性困难。因此,我们开发的不断成熟的每项组件技术都将在其他许多领域得到应用,而不仅限于地下。
在人-机器人团队中,人的恰当位置在哪里?纳文达•科特奇:人有两个极端的位置。一个是你按下按钮,机器人就会去做它们的事情;另一个是我们所说的“人在回路中” (human in the loop),因为机器体上是通过高级命令实现远程控制的。但是,如果人离开回路,回路就会中断,系统就会停止,在脆弱的通信中,我们经历过这种情况。这中间地带是“人在回路上”(human on the loop)的概念,即由一个监管员设置任务级目标,但如果人离开回路,回路仍然可以运转。人的价值增加了,因为他们能更好地概览整个场景中发生的事情,这是人非常擅长的事情。
纳文达•科特奇:要使现场机器人取得成功,需要许多项技术协同运行。我想这就是非常复杂的地下挑战赛迫使我们做的事情。能够在真实场景中可靠地部署机器人这个整体概念,对我们来说是关键。回顾我们团队的发展,3年前我们有一些很酷的零散技术,但如果没有人去维护,我们的机器人系统的可靠工作时间无法超过。这是我们取得的最大进步之一,现在继续这项工作时,我们不必再考虑如何部署机器人,也不用担心如果我们10分钟不管它们,它们会不会毁了自己。为了在地下挑战赛取得成功,我们不得不设计和制造鲁棒可靠的系统,正因如此,我们才拥有了这样的技术成熟度。下一步开始关注的问题是:当你拥有一支可靠的自主机器人战队,你能做什么?
您的机器人团队绘制的赛道地图与DARPA官方地图相差不到1%,真是太了不起了。纳文达•科特奇:最后一场比赛刚结束,DARPA聘请绘制地下挑战赛赛道真实地图的公司立刻联系了我。他们使用非常昂贵的设备,花了100个工时才制作出他们的地图,他们想知道我们究竟是如何在不到1个小时的时间里用一群机器人绘制出地图的。这是个好问题!但要知道,我们这1小时的绘图15年研发的结果。 理论上可行与现实世界中切实可用是不一样的。在早期阶段,我们的软件是成功的,我们认为它达到了所有的理论里程碑。后来我们开始把它应用到现实世界,在非常困难的环境中进行测试,在那里开始寻找它出现问题的各种临界情况。基本上,在过去的十几年里,我们试图尽可能多地突破绘图系统的极限,使它变成了一个真正设计精良的解决方案。老实说,看到我们绘图系统的成果时,我们仍然会感到惊讶!
是什么让您决定参加地下挑战赛?科斯塔•亚历克西斯:激励每个参赛人员的是对自主机器人的理解,这项挑战赛是极其困难和有价值的。我们知道,如果有人陪伴或遥控,机器人系统可以在这些环境中运行,但我们也知道,我们距离完全自主还很远。而且我们明白机器人代替人类进入危险场景的价值。正是这种社会影响和技术挑战的结合吸引了我们,尤其是在这样一个竞争环境下,你不能只在实验室里工作、写论文,你必须开发出一种能一直坚持到底的东西。
对您的团队来说,地下挑战赛最具挑战性的部分是什么?科斯塔•亚历克西斯:我们目前可以在类似于办公环境的正常场景中操作机器人,但地下挑战赛提出了许多挑战。首先,依靠与机器人的通信是不可行的。其次,地形也非常复杂。通常,对机器人困难的地形对人来说可能很容易,但面对天然洞穴地形时,我第一次觉得这对人类来说也是一个挑战。第三,挑战赛拥有的是一公里的环境规模。机器人必须在其自主性和功能性方面表现出一定程度的鲁棒性和智能性,而当时最先进的机器人技术也无法做到这一点。地下挑战赛很了不起的一点是,DARPA在一开始时就知道机器人技术尚不具备这种能力,但依然坚持要我们在接下来的3年里,打造一支有竞争力的机器人团队。我认为这种方法对所有参赛团队都很有效,对加速研究有着极大的推动作用。
随着机器人变得更加自主,人将发挥哪些作用?科斯塔•亚历克西斯:事实上,现在我们可以从机器人那里得到非常好的地图,我们可以进行目标检测,等等。但是,我们没有办法将环境中的所有物体关联起。
